1 HW 14
1.1 规则运动
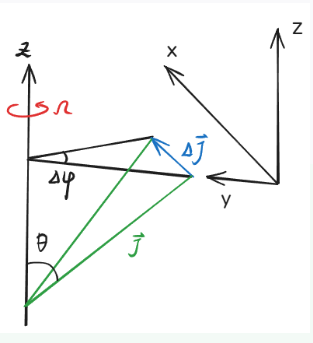
根据角速度和欧拉角的关系直接计算可得
1.2 这是一道微改的考试原题
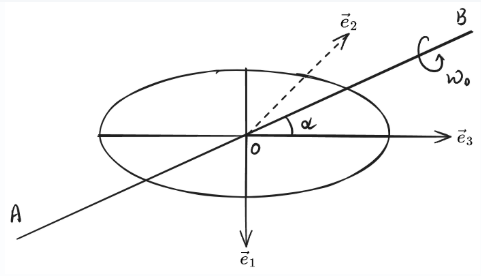
(2016) 五、(15 分) 质量为 , 半长轴 、半短轴为 的椭圆形匀质盘绕通过其中心且在盘平面内的固定轴 作匀速转动, 角速度为 。转轴与㮋圆半长轴的夹角为 , 转轴质量可以忽略。
(1) 求主转动惯量;
(2) 写出角速度在主轴系中的分量;
本题:(3) 写出匀质盘的转动动能.
原题:(3)' 求该椭圆盘所受到力矩。
Drawing 2024-11-14 11.23.13.excalidraw
解:以椭圆盘中心 O 为原点,建立如图所示的主轴坐标系 (右手系), 沿短轴方向, 沿长轴方向, 垂直纸面向里。转动角速度在此主轴系的分量为 . 因为匀速转动, 所以
(1) 直接计算给出
令
类似地, .
(2) 转动角速度在此主轴系的分量为
(3) 在主轴系中,
得到
(3)' 由欧拉动力学方程
可得 , 圆盘所受到的力矩大小为 ,方向为沿 .
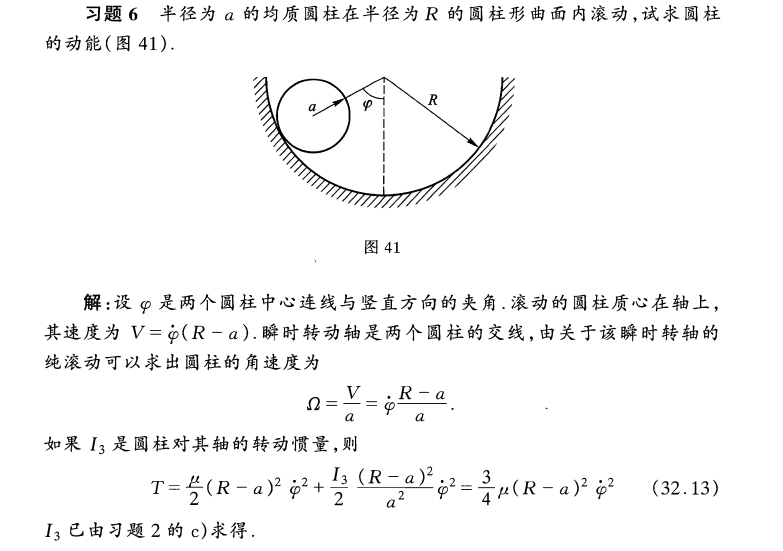
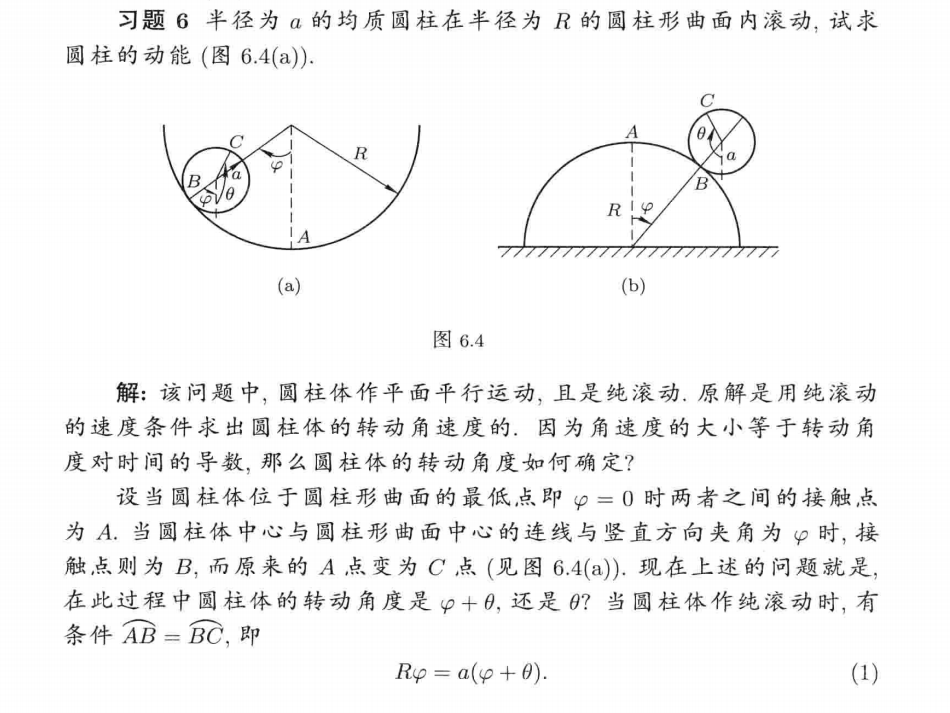
1.3 匀质圆柱
朗道:
接下来,微振动的拉氏量:
得到拉格朗日方程
附鞠国兴解读:
1.4 均质圆锥
朗道:
鞠国兴解读:
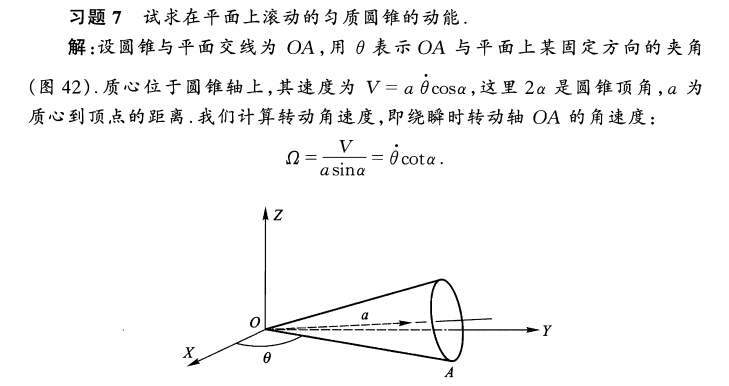
1.5 滚动的匀质圆锥
朗道:
1.6 均质正方体
注意到
则特征方程
显然 ,,即 ,,三个主轴方向:
2 HW 15
2.1 欧拉陀螺
(1)
回忆,在推导题目给定的(1)式时,假定了惯性系的 z 轴为守恒角动量 的方向,所以,在本体系中
这里
所以
或者
(2)
对称欧拉陀螺是规则运动的,已知在本体系中
记实验系坐标轴 x,y,z,将角速度在 z 轴投影得到
或者直接计算
2.2 共面性质
本体系中
所以
所以三者共面。
2.3 均质盘旋转
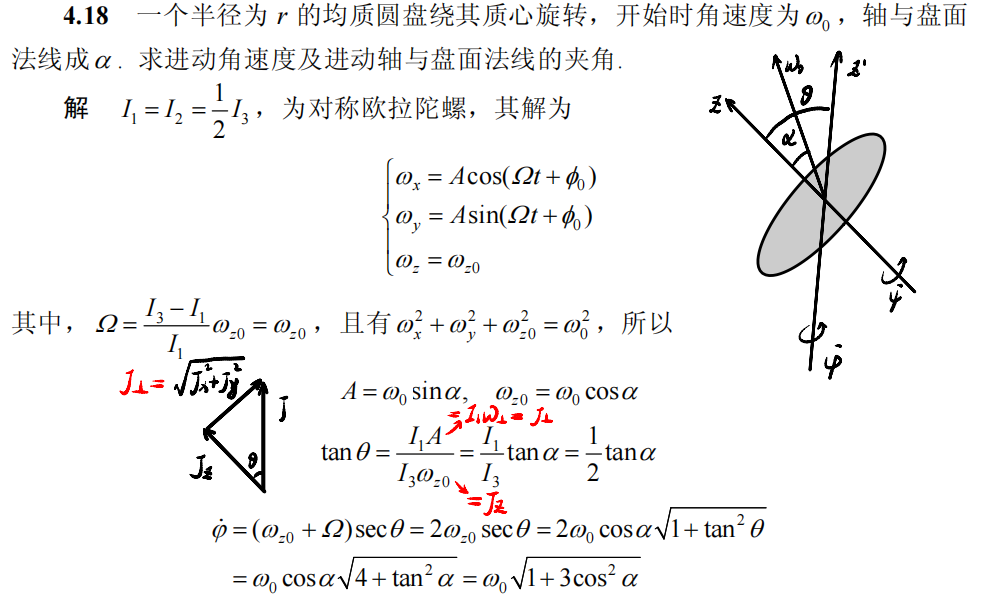
2.4 这是一道真题
Drawing 2024-11-14 14.15.10.excalidraw
(1)
根据循环坐标得到运动积分
以及 H 不显含 t:
(2)
运动积分:
另一道类似的:
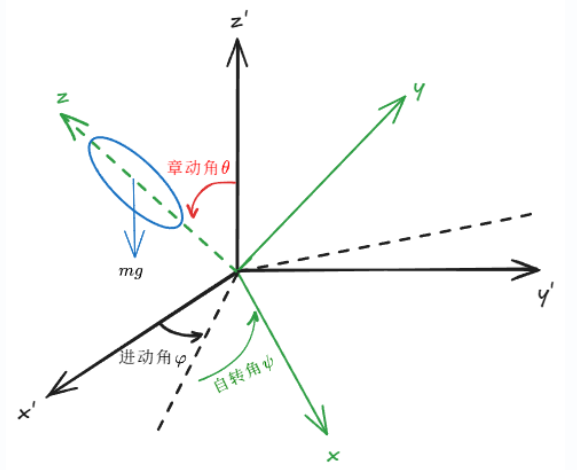
(2021) 五、(25 分)拉格朗日陀螺为在重力场中的对称刚体 。它的拉格朗日量为:
(1)根据 的对称性,找出系统的三个守恒量并说明理由;
(2)根据刚体的欧拉动力学方程, 证明广义动量 和 为运动积分。
(1) 拉格朗日量 不显含时间, 因此哈密顿量 为守恒量。另外, 为循环坐标, 因此正则动量 为运动积分, 即:
(2) 力矩的方向显然同时垂直于刚体的 轴和实验室系的 方向, 因此,
根据欧拉动力学公式有:
即
另外,
易得:
其中刚体绕实验室系的 轴的转动惯量为:
2.5 这也是一道考试原题
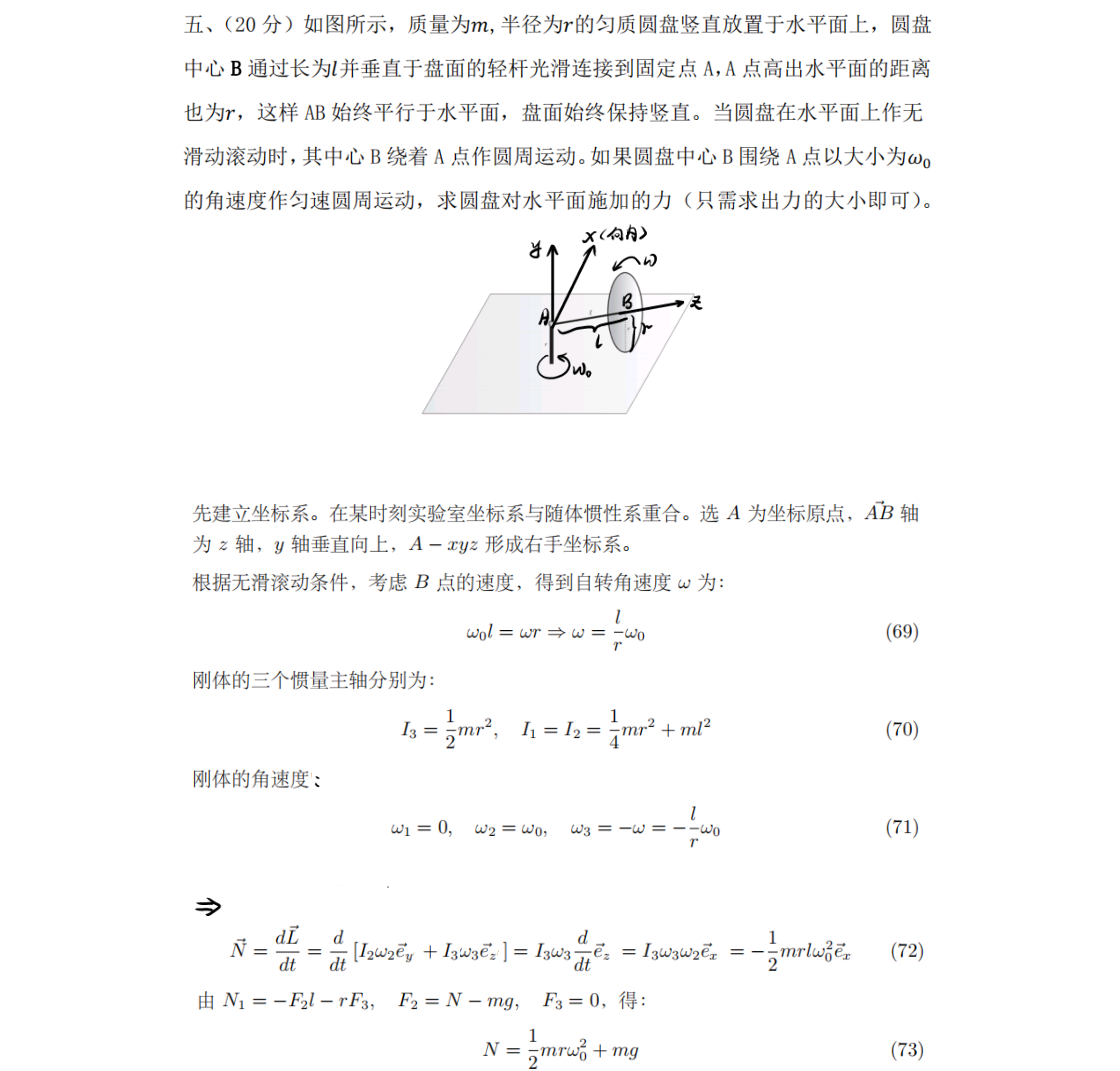
也可以由角动量的进动角速度 得到,
附 :
对于 方向力矩,不需要考虑,它只对角动量的自转起作用。只考虑垂直于 方向的力矩 。
如图,角动量守恒:
可以发现有效力矩指向 方向。进动周期:
2.6 这题作为第三小问考过
注意到
在 时, 自动成立,所以条件只有 ,此时
即
必须有解。
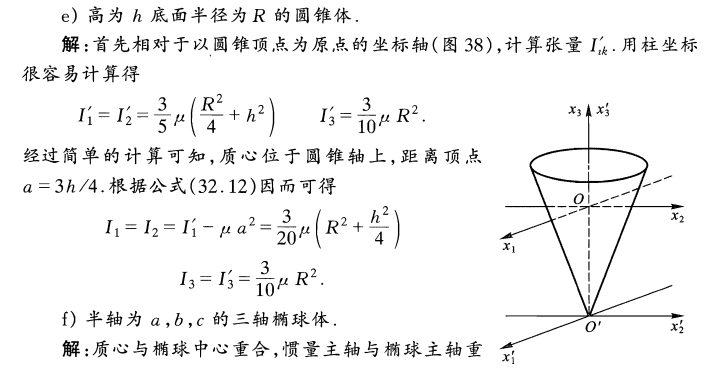
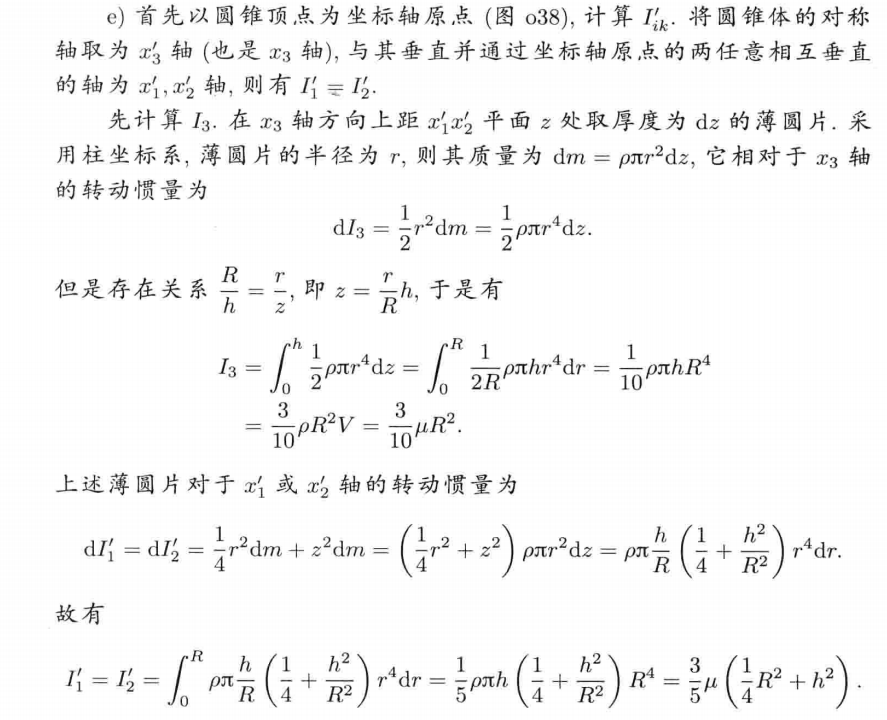
一个圆锥密度均匀为 , 总质量 , 底部的圆半径为 , 高为 。
(1). 求相对于圆雉顶点的主转动惯量 .
(2). 以圆雉顶点为固定点, 求重力场中, 该重对称陀螺的拉氏量及三个守恒量方程.
(3). 重对称陀螺也能均匀进动 (章动角 和进动角速度 保持不变)。以圆锥顶点为固定点, 求该重对称陀螺可以均匀进动的角速度 , 并给出均匀进动的存在性条件
(1) 选取 轴为垂直于底面的对称轴的坐标系, 原点在底面中心。得:
tips : 积分时使用平行轴定理
(2) 刚体的质心高度 :
刚体的拉格朗日量为
三个守恒量分别为:
(3) 解法一:
根据欧拉-拉格朗日方程, 得到 方向的运动方程为:
均匀进动时, , 因此,
这是关于 的二次方程,方程有解的条件:
即:
解法二 :
根据上面三个守恒量, 得到 方向的运动满足:
均匀进动的条件为 取极小值, 即:
令:
另有:
由 , 得到:
由 , 得到:
利用:
得到:
这是关于 的二次方程,方程有解的条件是:
即: